Die M5Stack Atom Serie mit einer Größe von nur 24 * 24mm sind sehr kompakte Entwicklungsboards der M5Stack Development Kit Serie. Die angebotenen Varianten verwenden alle einen ESP32-PICO, der WiFi- und Bluetooth-Konnektivität bietet und über 4 MB seriellen SPI-Flash verfügt. Über sechs GPIOs kann der Controller mit externen Sensoren und Aktoren verbunden werden. Die Typ-C-USB-Schnittstelle ermöglicht ein schnelles Programm-Upload und stellt eine RS232-Schnittstelle zur Verfügung. Eine HY2.0-Schnittstelle dient als Grove-Port.
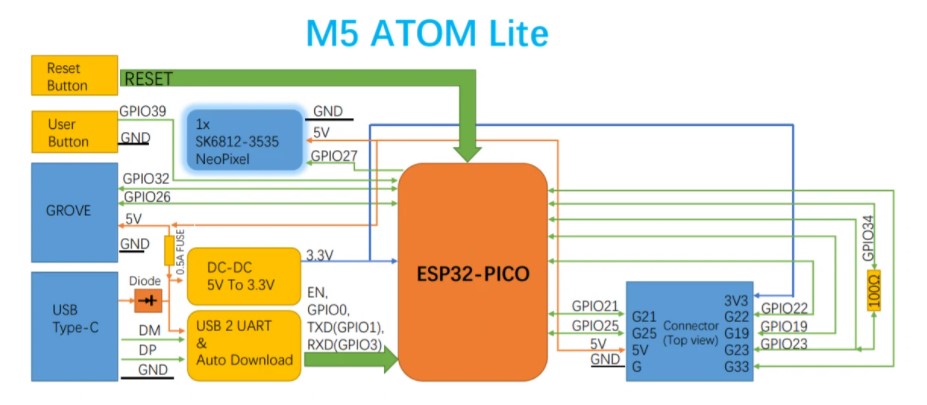
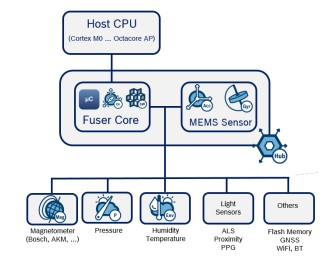
Das einfachste Modell der M5Stack Atom Serie ist der Atom Lite, der zusätzlich noch eine Infrarot- und eine RGB-LED und zwei Tasten bietet. Das folgende Blockdiagramm zeigt die zur Verfügung stehenden Komponenten.
Zahlreiche Hardware-Erweiterung ermöglichen eine einfache Anpassung an die betreffende Anwendung. Zu nennen sind beispielsweise das ATOMIC DIY Proto Kit for ATOM Series, ATOM HUB DIY Proto Board Kit, ATOM HUB AC/DC Remote Control Switch Kit, Atom DTU LoRaWAN Kit 868MHz, Atom DTU NB-IoT Kit Global Version und andere mehr. Eine Übersicht finden Sie unter https://shop.m5stack.com/collections/atom-series.
Naturgemäß fehlt dem kompakten Controllerboard ein Display, was aber mit den folgenden M5Stack Displaykomponenten beigestellt werden kann.

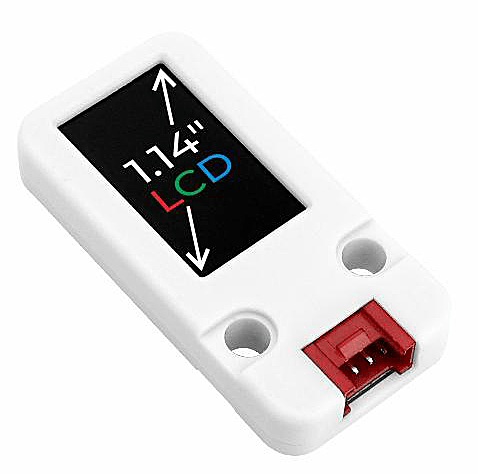
Die M5Stack OLED Unit ist ein OLED-Display mit einer Diagonalen von 1.3 “ und einer Auflösung von 128 x 64 Pixeln. Die M5Stack LCD Unit ist ein farbiges LCD mit einer Diagonalen von 1.14 “ und einer Auflösung von 240 x 135 Pixeln. Beide Display Units verfügen über ein Grove-I2C-Port und können über den I2C-Bus vom Atom aus angesteuert werden.
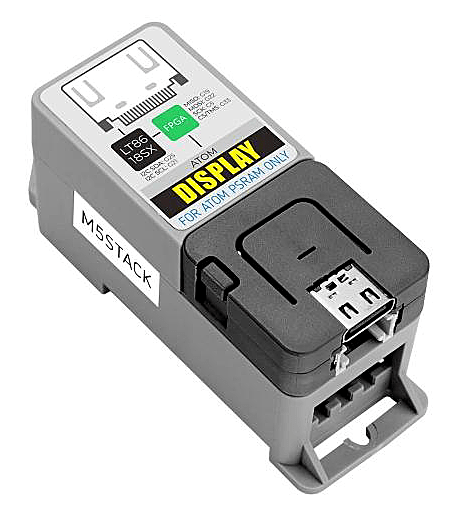
Der M5Stack Atom Display Driver ist ein All-in-One-Displaytreiber-Kit und weist ein HDMI-Interface zu einem Computer-Bildschirm mit einer maximalen Auflösung von 1280 x 720 Pixeln auf. Es wird ein FPGA verwendet, um die traditionelle SPI-TFT-LCD-Datenausgabe zu simulieren und bietet ein Videosignal mit präzisen Farben. Der Built-In ATOM PSRAM Main Controller (ESP32-PICO-V3-02 mit 8 MB Flash + 2 MB PSRAM) bietet auch wieder WiFi und Dual-Mode-Bluetooth.
Im Post AZ-Touch ESP32 Grafiktest hatte ich einen Grafik-Benchmark gezeigt, der die Eigenschaften der Kombination ESP32-Mikrocontroller und ILI9341-TFT-Display verdeutlichen sollte. Diesen Benchmark habe ich für die drei gezeigten Display angepasst, um deren Verhalten zu vergleichen. Sie finden das Programm M5Atom_Display.ino auf Github. Im folgenden Video sehen Sie die Ausgaben des M5Stack Atom Display Drivers auf einem 22″ Bildschirm.
Bei den beiden kleineren Displays wird bei den Textausgaben und der JPG-Ausgabe mitunter der Bildschirmrand verlassen. Eine entsprechende Skalierung wurde bewusst nicht vorgenommen, da der Test für derart kleine Auflösungen ohnehin nur bedingt geeignet ist.
Die folgende Grafik zeigt die Laufzeit der einzelnen Tests und vermittelt dabei einen ersten Eindruck. Obwohl bei Pixel und Line Test die Laufzeiten stark differieren, liegen die Laufzeiten der meisten Tests durchaus in der Nähe des über SPI angesteuerten ILI9341-Displays.

2021-11-19/CK






















Du muss angemeldet sein, um einen Kommentar zu veröffentlichen.